Preprints
* indicates equal contribution
Andrew Jesson, Yiding Jiang
Arxiv, 2024 | [code]
Publications
Fahim Tajwar*, Guanning Zeng*, Yueer Zhou, Yuda Song, Daman Arora, Yiding Jiang, Jeff Schneider, Ruslan Salakhutdinov, Haiwen Feng, Andrea Zanette
ICML, 2026 (oral) | [Website] [code]
SPOT Workshop @ ICLR, 2026 (Best Paper Award)
Pratyush Maini*, Sachin Goyal*, Dylan Sam*, Alexander Robey, Yash Savani, Yiding Jiang, Andy Zou, Matt Fredrikson, Zachary Chase Lipton, J. Zico Kolter
NeurIPS, 2025 | [Website] [safety classifier] [SafeWeb dataset] [RefuseWeb dataset] [Moral Education dataset]
Vedant Gupta, Haotian Fu, Calvin Luo, Yiding Jiang, George Konidaris
NeurIPS, 2025 | [code]
Fahim Tajwar*, Yiding Jiang*, Abitha Thankaraj, Sumaita Sadia Rahman, J. Zico Kolter, Jeff Schneider, Ruslan Salakhutdinov
ICML, 2025 (oral) | [Website] [code] [SFT dataset] [DPO dataset]
Yiding Jiang*, Allan Zhou*, Zhili Feng, Sadhika Malladi, J. Zico Kolter
ICLR, 2025 | [code] [blog post]
Yiding Jiang, Christina Baek, J. Zico Kolter
ICLR, 2024 (oral)
Victor Akinwande, Yiding Jiang, Dylan Sam, J. Zico Kolter
ICLR, 2024
Sampling and Optimization in Discrete Space workshop, ICML 2023 (Outstanding Paper)
Allan Zhou, Kaien Yang, Yiding Jiang, Kaylee Burns, Winnie Xu, Samuel Sokota, J. Zico Kolter, Chelsea Finn
NeurIPS, 2023
Allan Zhou, Kaien Yang, Kaylee Burns, Adriano Cardace, Yiding Jiang, Samuel Sokota, J. Zico Kolter, Chelsea Finn
NeurIPS, 2023
Yiding Jiang, J. Zico Kolter, Roberta Raileanu
NeurIPS, 2023 | [code]
Yiding Jiang*, Evan Z. Liu*, Benjamin Eysenbach, J. Zico Kolter, Chelsea Finn
NeurIPS, 2022 | [code]
Christina Baek, Yiding Jiang, Aditi Raghunathan, J. Zico Kolter
NeurIPS, 2022 (oral)
Yiding Jiang*, Vaishnavh Nagarajan*, Christina Baek, J. Zico Kolter
ICLR, 2022 (spotlight) | [blog post]
Yiding Jiang, Parth Natekar*, Manik Sharma*, Sumukh K Aithal*, Dhruva Kashyap*,
Natarajan Subramanyam*, Carlos Lassance*, Daniel M. Roy, Gintare Karolina Dziugaite, Suriya Gunasekar,
Isabelle Guyon, Pierre Foret, Scott Yak, Hossein Mobahi, Behnam Neyshabur*, Samy Bengio
PMLR: NeurIPS 2020 Competition and Demonstration Track, 2020 | [competition page] [Codalab] [competition dataset] [competition code]

Yiding Jiang*, Behnam Neyshabur*, Hossein Mobahi, Dilip Krishnan, Samy Bengio
ICLR, 2020
"Science meets the Engineering of Deep Learning" workshop, NeurIPS 2019 (oral)
Xingyou Song, Yiding Jiang, Stephen Tu, Yilun Du, Behnam Neyshabur
ICLR, 2020
Yiding Jiang, Shixiang Gu, Kevin Murphy, Chelsea Finn
NeurIPS, 2019 | [project page] [environment]
David Wang*, David Tseng*, Pusong Li*, Yiding Jiang*, Menglong Guo, Michael Danielczuk, Jeffrey Mahler, Jeffrey Ichnowski, Ken Goldberg
CASE, 2019 | IEEE Spectrum article
Yiding Jiang, Dilip Krishnan, Hossein Mobahi, Samy Bengio
ICLR, 2019 | [blog post]
Technical Reports
Abitha Thankaraj*, Yiding Jiang*, J. Zico Kolter, Yonatan Bisk
LCFM Workshop @ ICML, 2025
Jivat Neet Kaur, Yiding Jiang, Paul Pu Liang
Arxiv, 2021
Workshop on Embodied Multimodal Learning, ICLR 2021
Projects
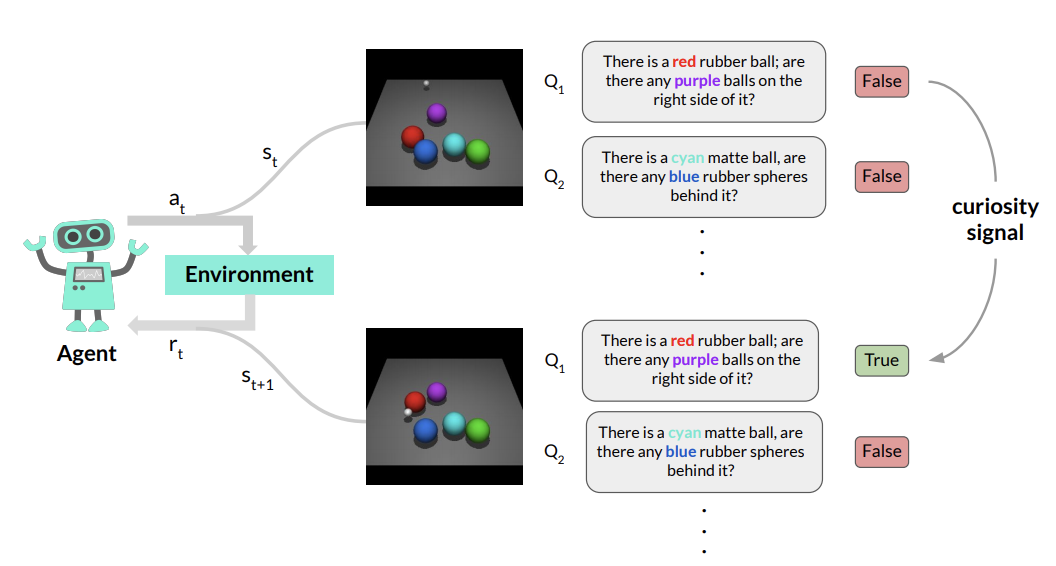
The CLEVR-Robot environment is a reinforcement learning environment that aims to provide a research platform for developing RL agents at the intersection of vision, language, and continuous/discrete control.
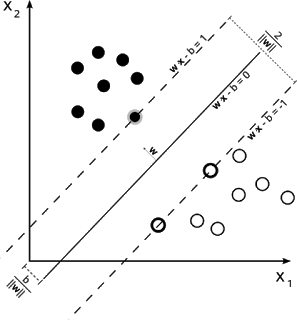
The DEMOGEN dataset is a collection of 756 trained neural network models and supporting code. This is the same dataset used in our work “Predicting the Generalization Gap in Deep Networks with Margin Distributions”, and is, to our knowledge, the first dataset of models specifically for studying generalization.

City2City is a project that restyles Google Street View images of one city with another city’s aesthetic style.
Updated June 2026. Template is adapted from here.