Yiding Jiang
yidingjiang3@gmail.com
I am a research scientist at Google DeepMind working on reinforcement learning and post-training for Gemini.
Previously, I was a PhD student at the Machine Learning Department of Carnegie Mellon University, where I worked with Professor Zico Kolter. My research was supported by the Google PhD Fellowship. I obtained my B.S. in Electrical Engineering and Computer Science at UC Berkeley, where I worked on robotics and generative models with Professor Ken Goldberg. In the past, I have spent time as an AI resident at Google Research and as a research intern at Meta AI Research and Cerebras Systems.
Research interests
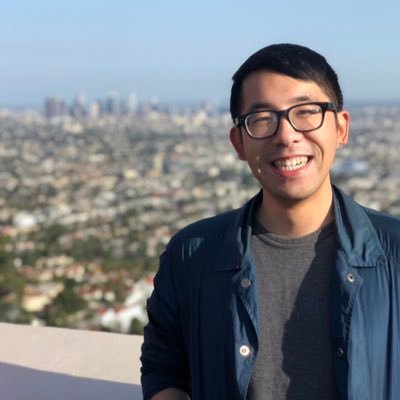
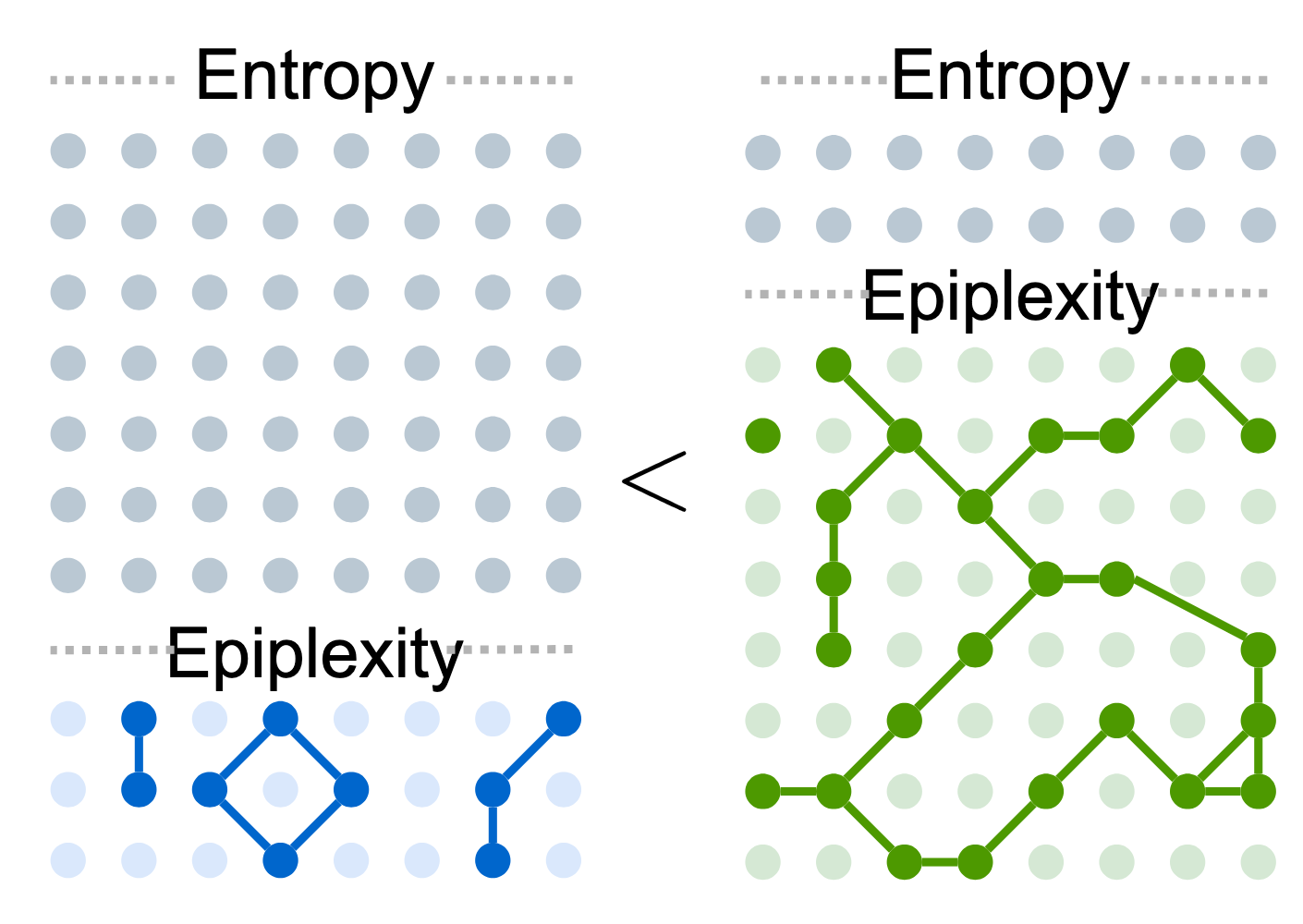
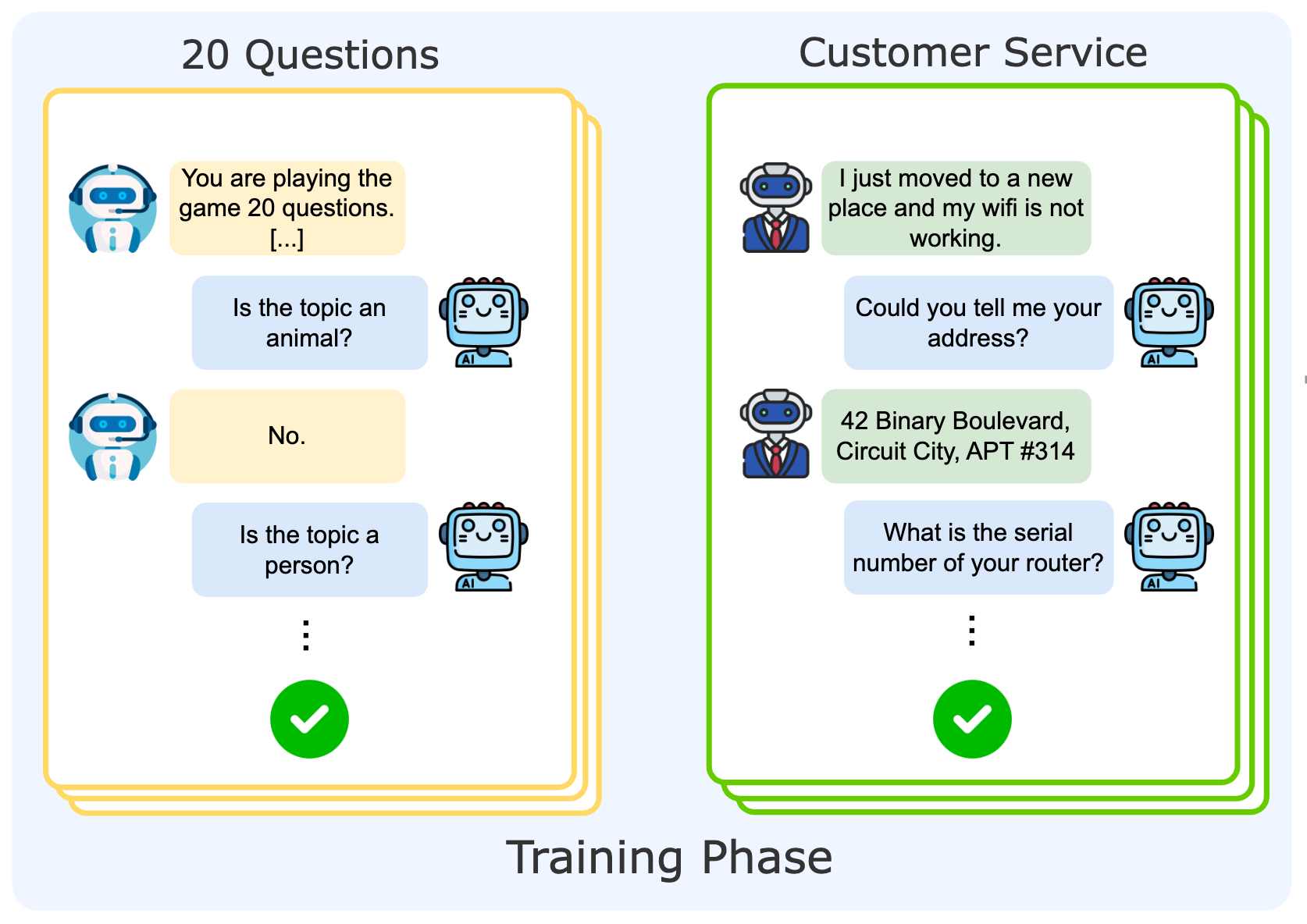
I am interested in understanding and improving generalization in artificial intelligence. My research spans a range of topics including the science and theory of deep learning, reinforcement learning, and information theory. One of my main focuses is to identify and quantify structural properties of real-world data that enable broad generalization and model capabilities. I am also interested in studying exploration as a mechanism to improve generalization by driving models to acquire diverse, informative data and adapt to changing environments.
Selected works
(full publication list)* indicates equal contribution
Fahim Tajwar*, Yiding Jiang*, Abitha Thankaraj, Sumaita Sadia Rahman, J. Zico Kolter, Jeff Schneider, Ruslan Salakhutdinov
ICML, 2025 (oral) | [Website] [code] [SFT dataset] [DPO dataset]
Yiding Jiang*, Allan Zhou*, Zhili Feng, Sadhika Malladi, J. Zico Kolter
ICLR, 2025 | [code] [blog post]
Yiding Jiang, Christina Baek, J. Zico Kolter
ICLR, 2024 (oral)
Yiding Jiang, J. Zico Kolter, Roberta Raileanu
NeurIPS, 2023 | [code]
Yiding Jiang*, Evan Z. Liu*, Benjamin Eysenbach, J. Zico Kolter, Chelsea Finn
NeurIPS, 2022 | [code]
Yiding Jiang*, Vaishnavh Nagarajan*, Christina Baek, J. Zico Kolter
ICLR, 2022 (spotlight) | [blog post]

Yiding Jiang*, Behnam Neyshabur*, Hossein Mobahi, Dilip Krishnan, Samy Bengio
ICLR, 2020
"Science meets the Engineering of Deep Learning" workshop, NeurIPS 2019 (oral)
Yiding Jiang, Shixiang Gu, Kevin Murphy, Chelsea Finn
NeurIPS, 2019 | [project page] [environment]
Teaching
- Teaching Assistant, 10-708 Probabilistic Graphical Models. Carnegie Mellon University. Fall 2022.
- Teaching Assistant, 10-725 Convex Optimization. Carnegie Mellon University. Fall 2021.
- Reader, CS170 Efficient Algorithms and Intractable Problems. UC Berkeley. Fall 2017.
Updated June 2026. Template is adapted from here.